

博鱼体育- 博鱼体育官方网站- APP下载酷哇科技发布全新具身智能世界模型CooWAIM 20 定义新一代具身大脑
2026-05-31博鱼体育,博鱼体育官方网站,博鱼体育APP下载本报讯 (记者梁傲男)一台在早高峰十字路口作业的轮式机器人,或者一只正准备跨越不规则台阶的四足机器狗,在执行动作前,是否需要对物理世界进行预演?
过去几年,随着视觉-语言-动作大模型的发展,机器人在理解指令与输出动作之间建立了有针对性的映射。但在复杂的城市开放场景中,例如面对前方突然逆行的非机动车,或者作业路线上滚落的杂物,传统模型往往容易遭遇决策瓶颈。
究其原因,目前业内的世界动作模型在架构设计上存在一定的局限:它们倾向于将“预测世界如何演变”和“决定智能体如何动作”分离为两个独立的分支。这种“先预测,后规划”的流水线模式,在很大程度上忽略了物理世界中至关重要的互惠性环境的未来状态,实际上取决于智能体当下采取的干预动作。
为解决这一行业技术痛点,5月29日,酷哇科技有限公司(以下简称“酷哇科技”)技术团队正式发布全新一代交互式世界模型 CooWAIM 2.0。作为Coowa WAM的跨代际演进版本,CooWAIM 2.0从底层架构上彻底突破了前代模型“预测与规划分离”的局限。该模型基于团队最新研发的DAWN(Denoising Actions and World iNteractive model)架构,论文和代码均已开源。
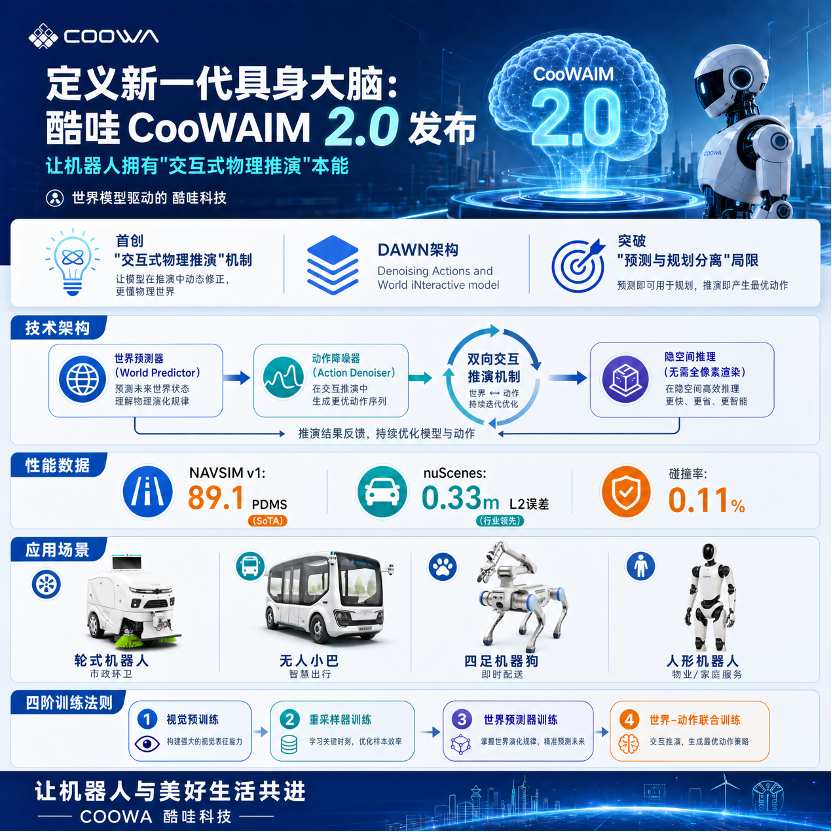
DAWN架构的提出,为交互式物理推演带来了新的“黎明”。CooWAIM模型首次将隐空间物理推理深度融入决策闭环,让世界预测与动作生成在推理过程中实现协同演化,为具身智能世界模型的发展提供了极具前瞻性的解法。
DAWN架构解决的并不是特定硬件的控制问题,而是“动作”与“环境演变”之间的通用博弈逻辑,这赋予了CooWAIM 2.0卓越的跨硬件平台泛化能力。
目前,酷哇科技正逐步将这套模型部署至旗下多元化的具身智能产品矩阵中,以适应不同复杂度的工作环境。
其中,在城市主干道与复杂街区中,车辆面临着高度动态的交通参与者。搭载CooWAIM 2.0的X系列智能清扫机器人与L4级无人小巴Coobus,能够在隐空间内实时推演行人、非机动车的行为意图,并在汇入车流或贴边作业时,进行更具交互感的自适应博弈,提升城市服务过程中的行驶平顺性与安全性。
相比于轮式设备,足式机器人的动作空间包含了更高频的关节力矩与地面反作用力计算。在面对台阶、松软草坪或散落物时,CooWAIM2.0展现了对非结构化地形的强大适应力,机器狗能够通过短时隐空间推演预判足端接触面的物理反馈,从而提前规避失稳风险,深入传统轮式设备难以触及的末端场景。
面向未来智能制造与家庭物业服务场景,人形机器人需要进行精细的接触式操作(如抓取、擦拭、协同搬运)。CooWAIM 2.0的自我进化闭环,将持续助力人形机器人在复杂的双臂协同与环境交互中,实现更稳定、更泛化的作业能力。
从自动驾驶到具身智能,从轮式底盘到四足与人形,酷哇科技始终聚焦“让机器人与美好生活共进”这一核心命题。CooWAIM交互式世界模型的发布,标志着酷哇在通用具身智能底座上的技术深度已构筑起坚实壁垒。
未来,酷哇科技将继续以世界模型为技术中枢,推动多形态机器人在更广泛的城市场景中实现规模化、经营性落地。
首先,一些地方在出台与消费品以旧换新相关的[详情]
互联网新闻信息服务许可证 增值电信业务经营许可证 京B2-20250455

证券日报网所载文章、数据仅供参考,使用前务请仔细阅读法律申明,风险自负。
